Metrics for Human-Centeredness in Robots
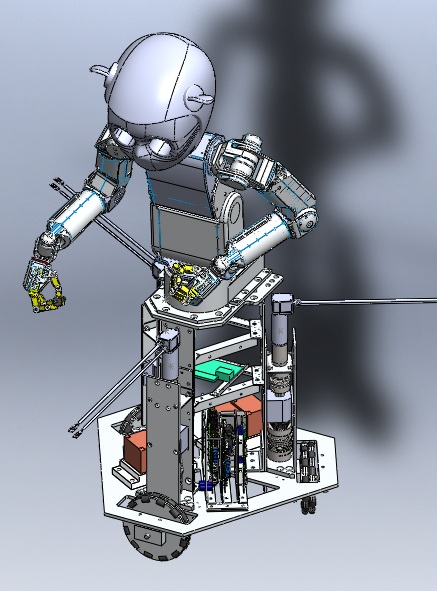
How do you measure the readiness of a robot to interact directly with human beings? Looking at it is not enough. We have metrics for car safety, house values, and surgery success, so why not have metrics for how well robots work with people, too?
Part of my Masters thesis in 2012 was to move toward creating a standard list of metrics for human-centered robots. Chapters 1 and 7 of my thesis address this, linked below. The image shown here is the robot that inspired many of the metrics discussed.
Reference:
- Masters thesis: “Methodology for creating human-centered robots: design and system integration of a compliant mobile base”. Link: https://repositories.lib.utexas.edu/handle/2152/ETD-UT-2012-05-5433
A Taxonomy of Robotics
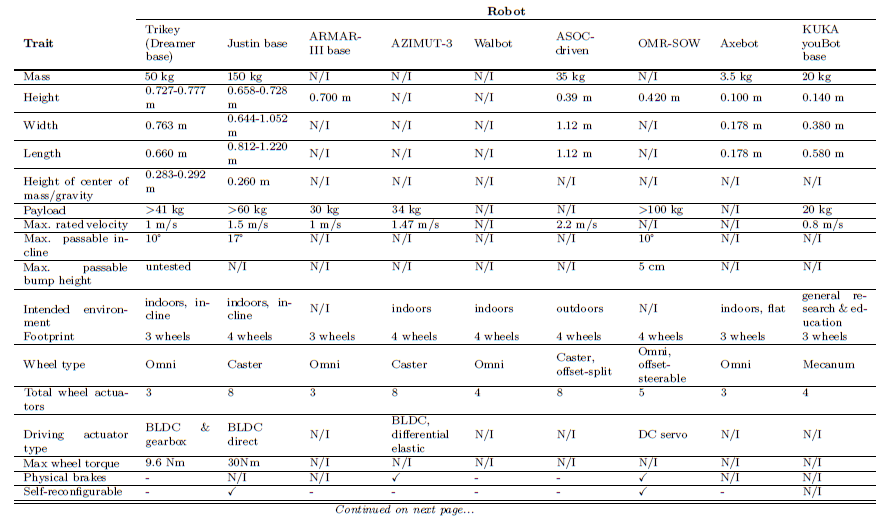
Robotics may not be living things yet, but it would be fun to start classifying them now how we classify biological organisms. The biological tree diverges based on our knowledge of evolution, genetics, and other observable characteristics of past and present species. Let’s start creating a robotic tree, too, at the beginning of the evolution of robots!
For example, my 2012 thesis already tried to lay out some “comparative anatomy” of various mobile wheeled robots and humanoid robots (Chapters 1 and 7). We can go further and use similar knowledge of many other robots, and when they were made, to classify them in helpful categories. Then in the future, we can talk about broad swaths of robot types more easily in our schools and everyday lives. The table here is from my thesis, and it serves as an example of one way to compare features and traits among different existing robots.
Reference:
- Masters thesis: “Methodology for creating human-centered robots: design and system integration of a compliant mobile base”. Link: https://repositories.lib.utexas.edu/handle/2152/ETD-UT-2012-05-5433
Mathematically Modeling Forces and Velocities in an Omnidirectional Wheeled Robot
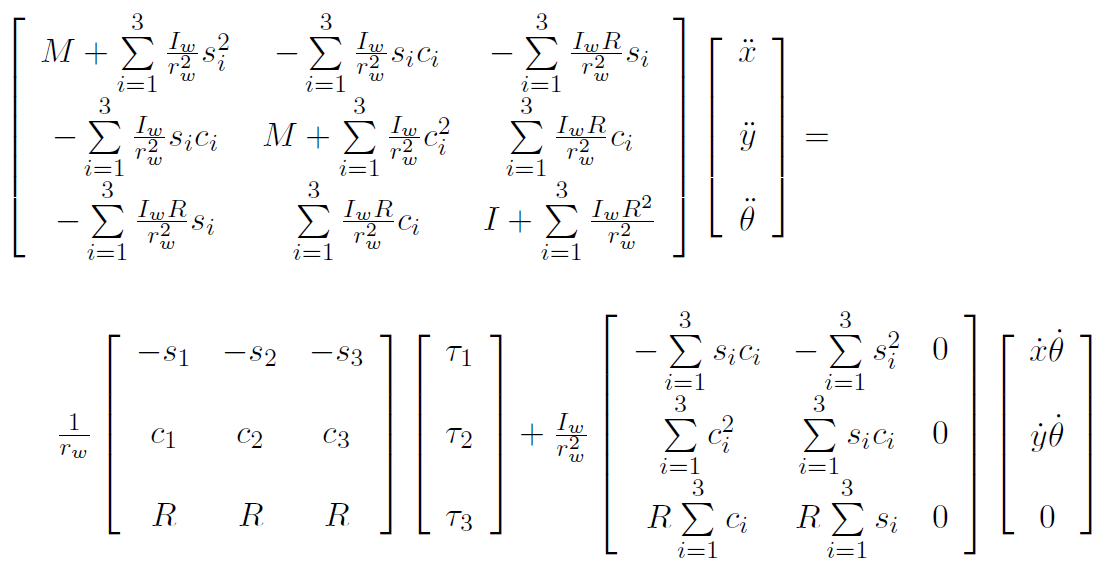
If you’re designing a wheeled robot, how much can it accelerate and spin before it tips over like a bad 90’s SUV? How powerful must the motors be to move sideways? What if you use heavy, monster-sized wheels? These are the types of questions I tried to answer using math and physics, back when doing my 2012 thesis on making a safe mobile robot.
If anyone else is building their own mobile robots – especially a three-wheeled holonomic omnidirectional one -- I hope my derivations are helpful! See Chapter 4 for cool math to help you size robot motors and set safety limits on velocity and acceleration. No more guessing and checking and wasting precious build resources!
Hint: Lighter wheels can simplify your life, math-wise. Just make sure they’re strong enough to support your weight…
Reference:
- Masters thesis: “Methodology for creating human-centered robots: design and system integration of a compliant mobile base”. Link: https://repositories.lib.utexas.edu/handle/2152/ETD-UT-2012-05-5433
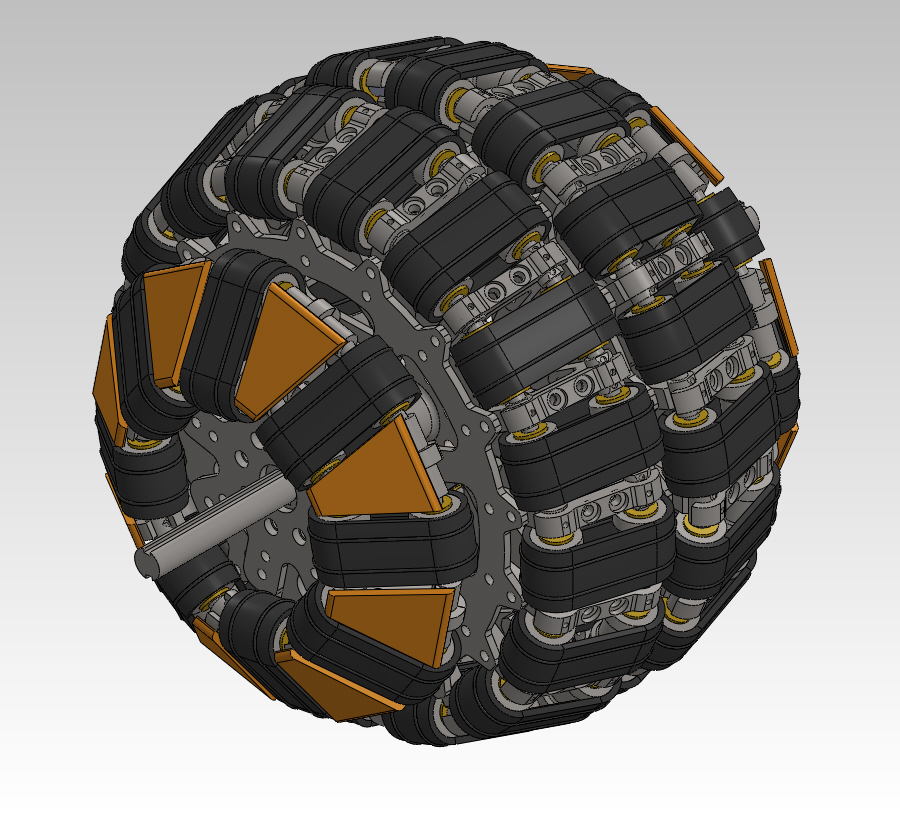
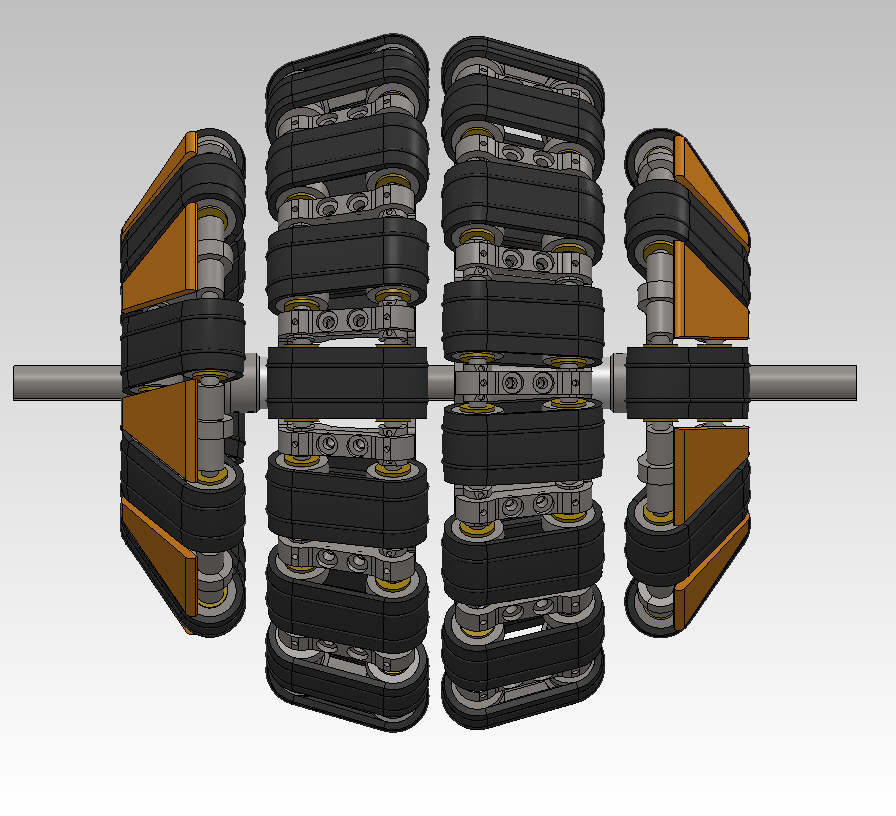
Tracked Omniwheel Design
Here’s a concept for an omnidirectional wheel designed for crossing bigger obstacles from the side. It has tracked rollers instead of just rollers alone. You can download the CAD files from my GrabCAD profile (also linked below), and you can read about it in Chapter 8 of my 2012 thesis, which has a more views.
References:
- CAD model: https://grabcad.com/library/tracked-omniwheel
- Masters thesis: “Methodology for creating human-centered robots: design and system integration of a compliant mobile base”. Link: https://repositories.lib.utexas.edu/handle/2152/ETD-UT-2012-05-5433